BEHEMOTH
Gąsienicowy pojazd RC
Ogólna idea
Projekt zaczał się, gdy będąc w liceum z nudów postanowiłem zbudować czołg. Chciałem mieć coś, czym mógłbym pojeździć po parku czy pod blokiem, głównie jednak interesowało mnie wyzwanie zbudowania takiego pojazdu. Na początku planowałem wyposażyć czołg w komputer pokładowy i lidar w celu autonomicznych działań, ale po drodze zakres projektu został okrojony.
Koncepcja
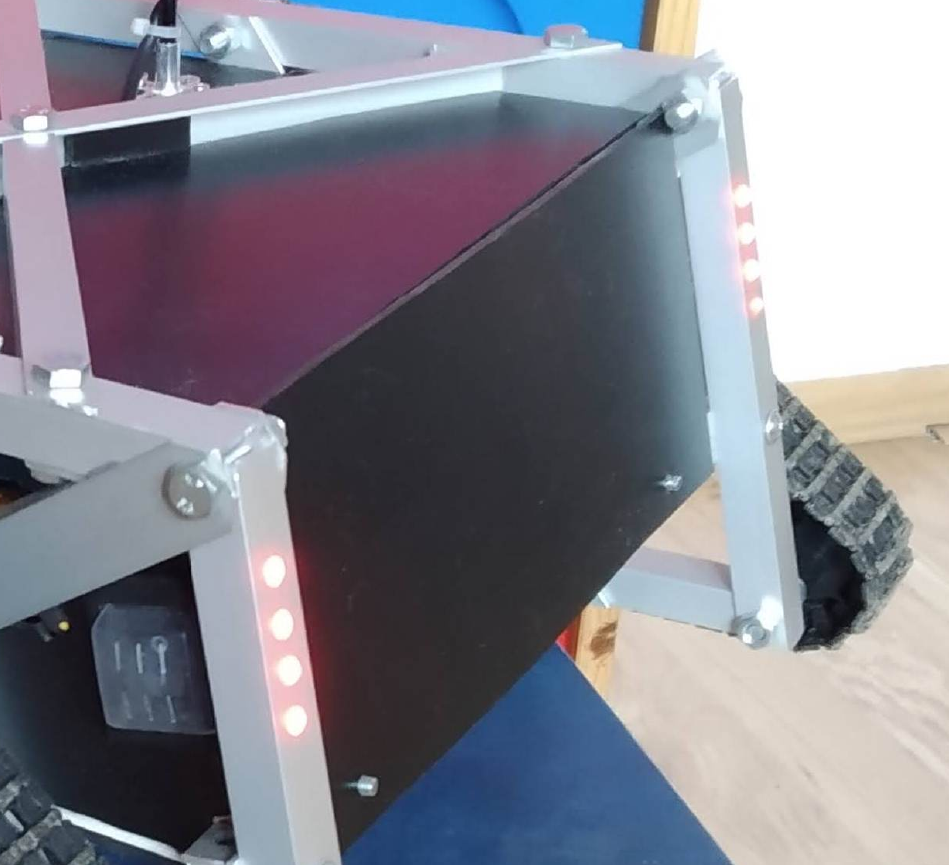
Główne wymagania dotyczące kształtu pojazdu brzmiały, że ma wyglądać fajnie i móc pokonywać przeszkody. Więc czołg dostał gąsienice w stylu I WŚ i duży prześwit, żeby nie zachaczał o przeszkody. Szybko udało mi się znaleźć na Ailexpresie pasujący zestaw kół i gąsienic, więc w oparciu o nie powstał konkretny kształt pojazdu. Cała reszta decyzji projektowych wynikała z procesów technologicznych jakie miałem dostępne -- nie miałem drukarki 3D, więc wszystko musiałem być w stanie wykonać ręcznie. Ostatecznie w całym pojeździe jedynymi elementami wydrukowanymi są malutkie dynksy przy enkoderach, ponieważ były dokładane dopiero w 2023 roku.
Praca Inżynierska
Lata po zbudowaniu czołgu opisałem go w swojej pracy inżynierskiej. Ten bardzo szeroki i wyczerpujący opis projektu załączam poniżej.
Praca Inżynierska
Rama 11.2019
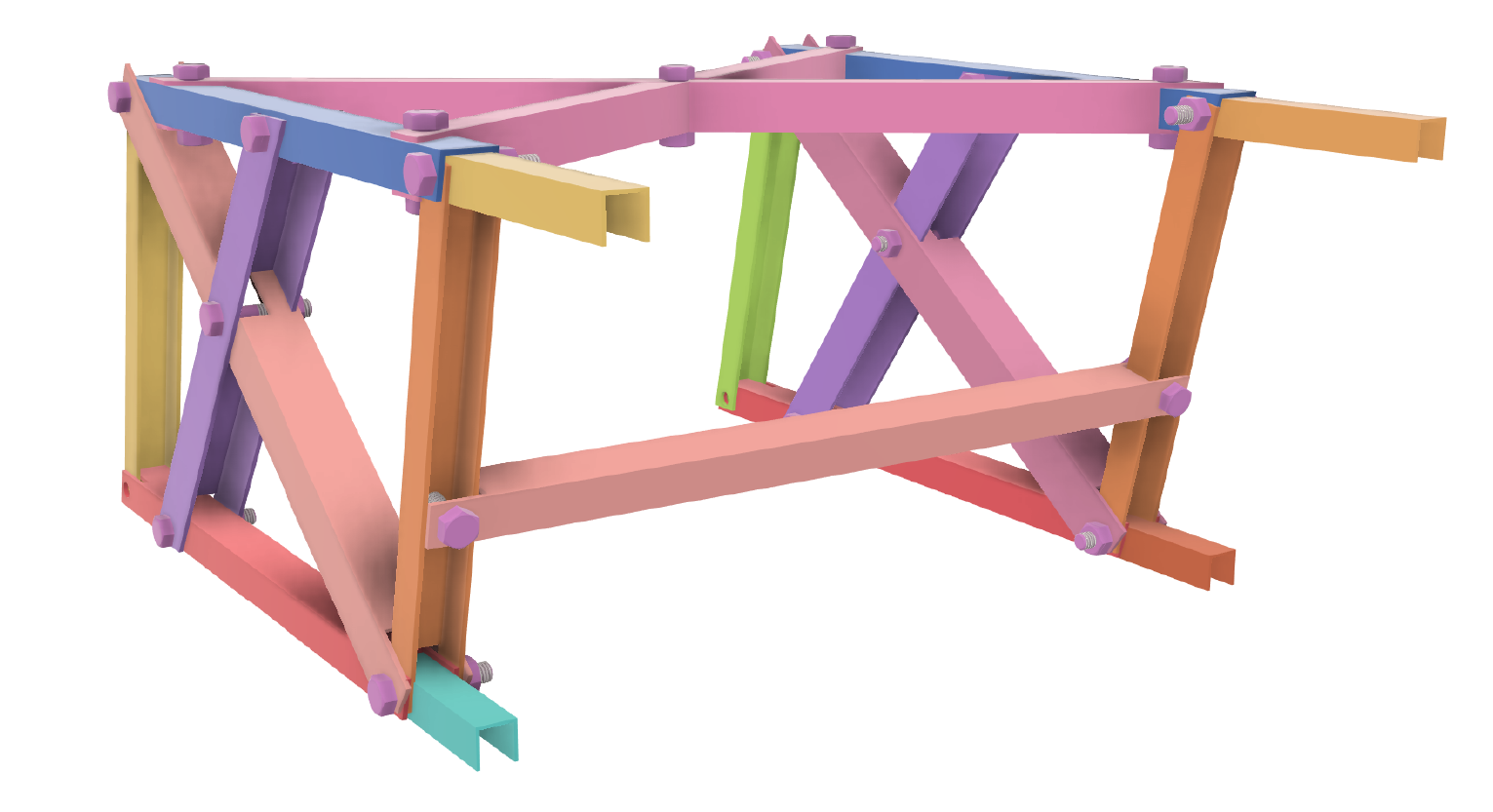
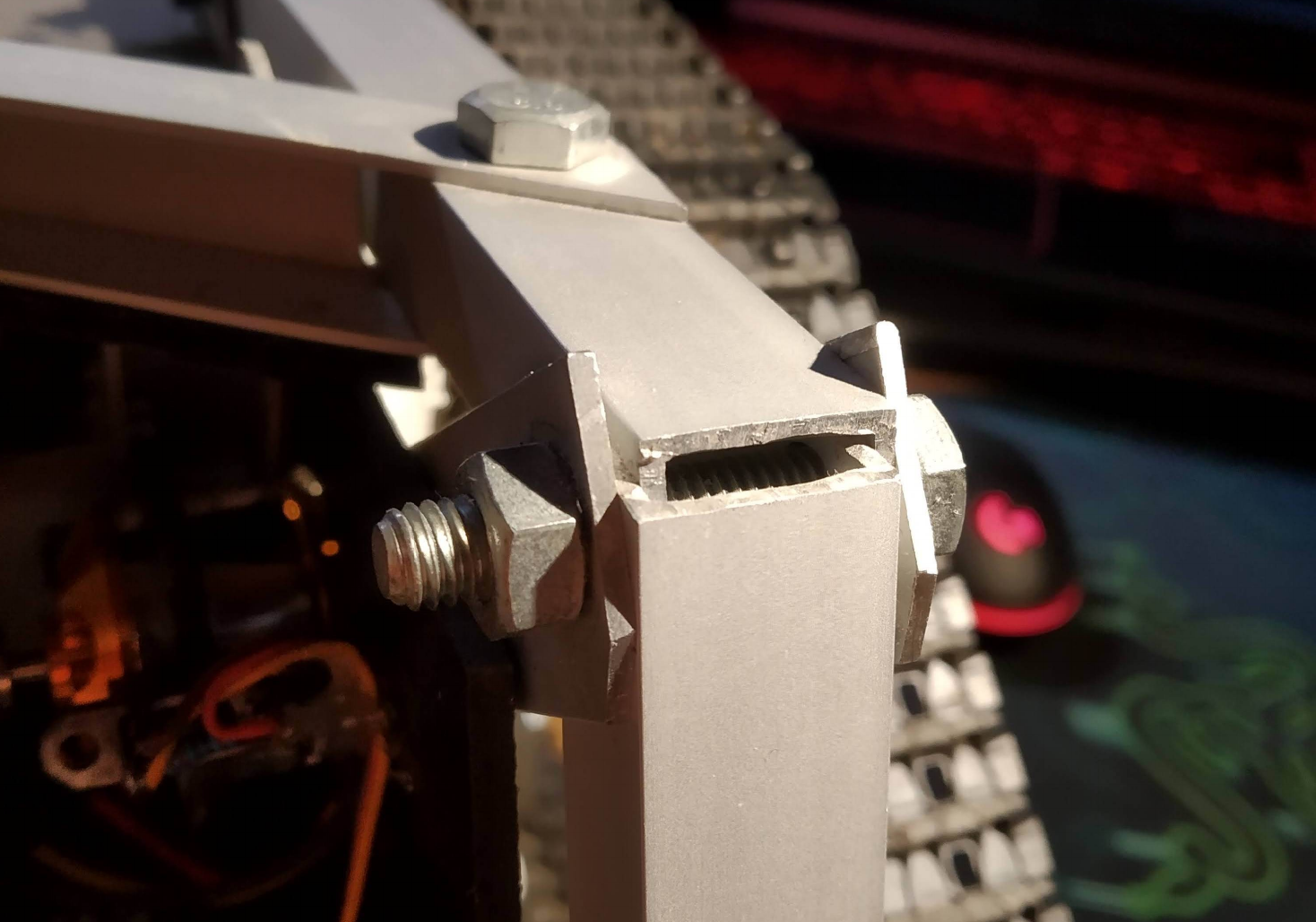
Pierwszą częścią budowy pojazdu była rama. Powstała ona z profili aluminiowych skręconych ze sobą śrubami M6. Geometria ramy nie powstała w CADzie, tylko została narysowana 1:1 na kartce. Zgodnie z tym rysunkiem wyciąte i zmontowane zostały profile. Powoduje to, że w całej ramie nic nie jest proste i nic nie ma okrągłych wymiarów. Prawy i lewy panel są też nieco różne. Nie był to jednak żaden problem na etapie budowania czołgu, bo do samego końca w projekcie nie był wykożystywany CAD.
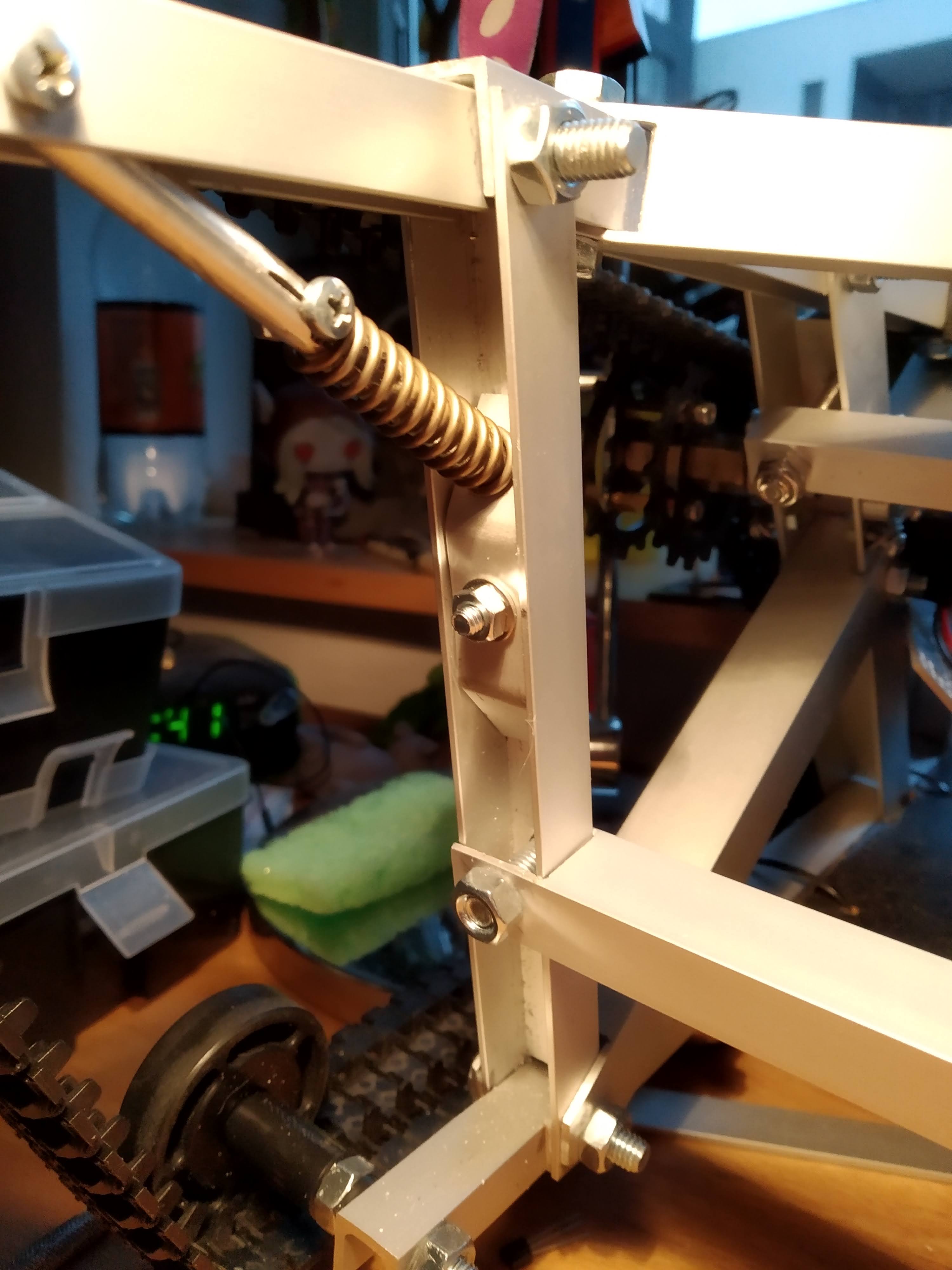
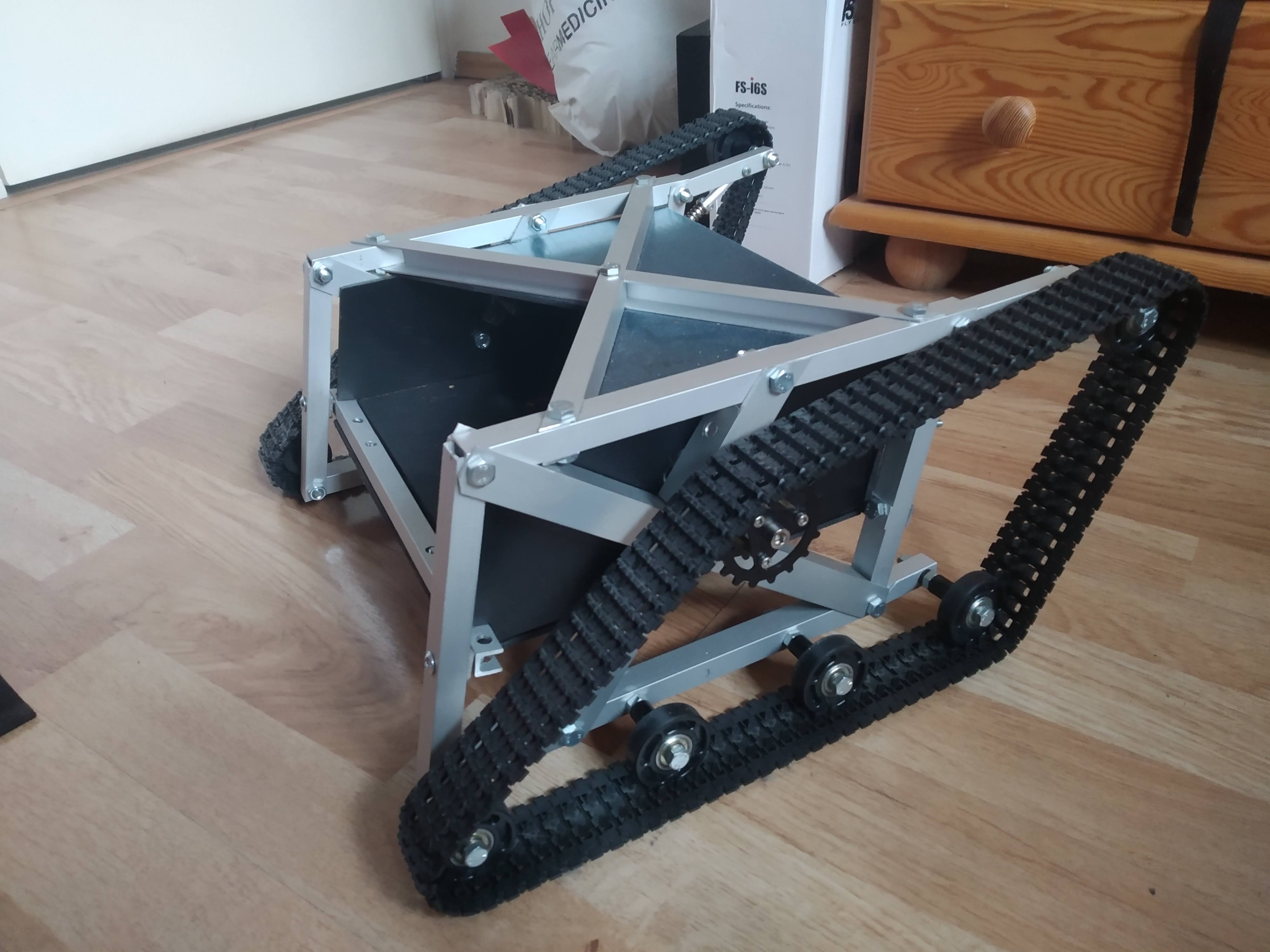
Rama składa sie z 2 kratownicowych paneli bocznych połączonych poprzecznymi łącznikami. W panelach znajdują się punkty montażu gąsienic -- to ich rozkład podyktował kształt ramy. Z przodu konstrukcji znajdują się 2 zestawy ramion -- dolne przymocowane są na sztywno i utrzymują przednie rolki gąsienic, a górne są ruchome, służąc za napinacze.
Żeby ochronić wnętrze pojazdu przed wodą, błotem i kurzem do ramy zamocowano panele obudowy. Panele wykonano z arkuszy czarnego spienionego PCV -- jest to całkiem wytrzymały ale prosty w obróbce materiał, który można ciąć nożem i wyginać po podgrzaniu. Całość jest całkiem szczelna, co pozwala utrzymać wnętrze w czystości, a dostęp do elektroniki zapewniony dzięki zdejmowalnej tylnej oraz górnej części obudowy.

Układ napędowy 10.2020
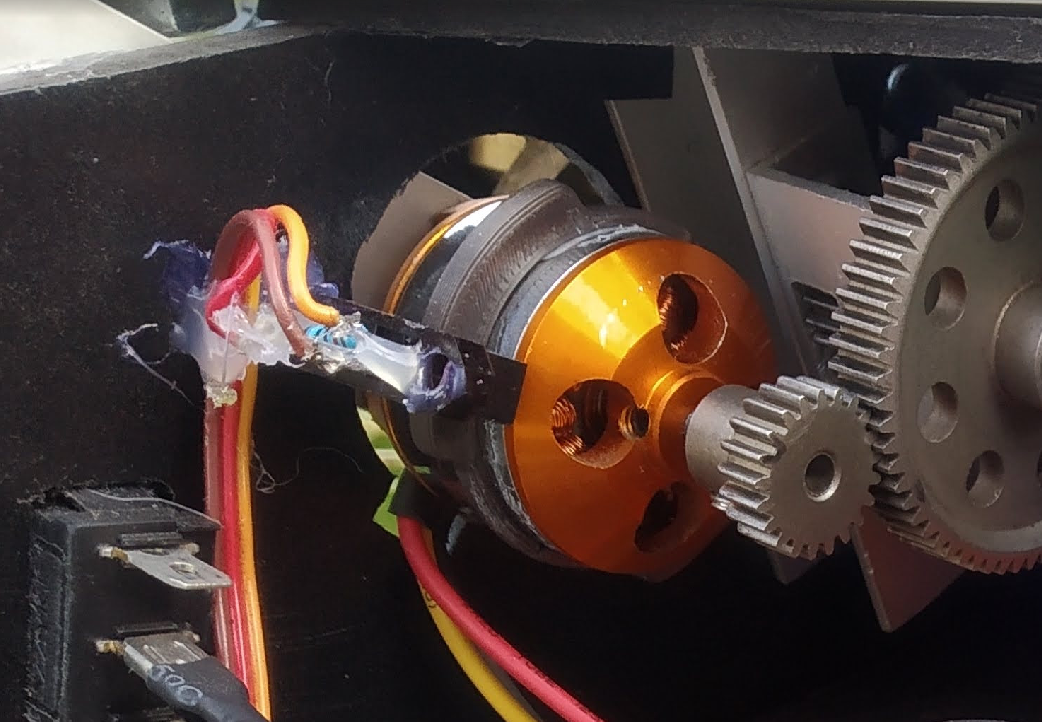
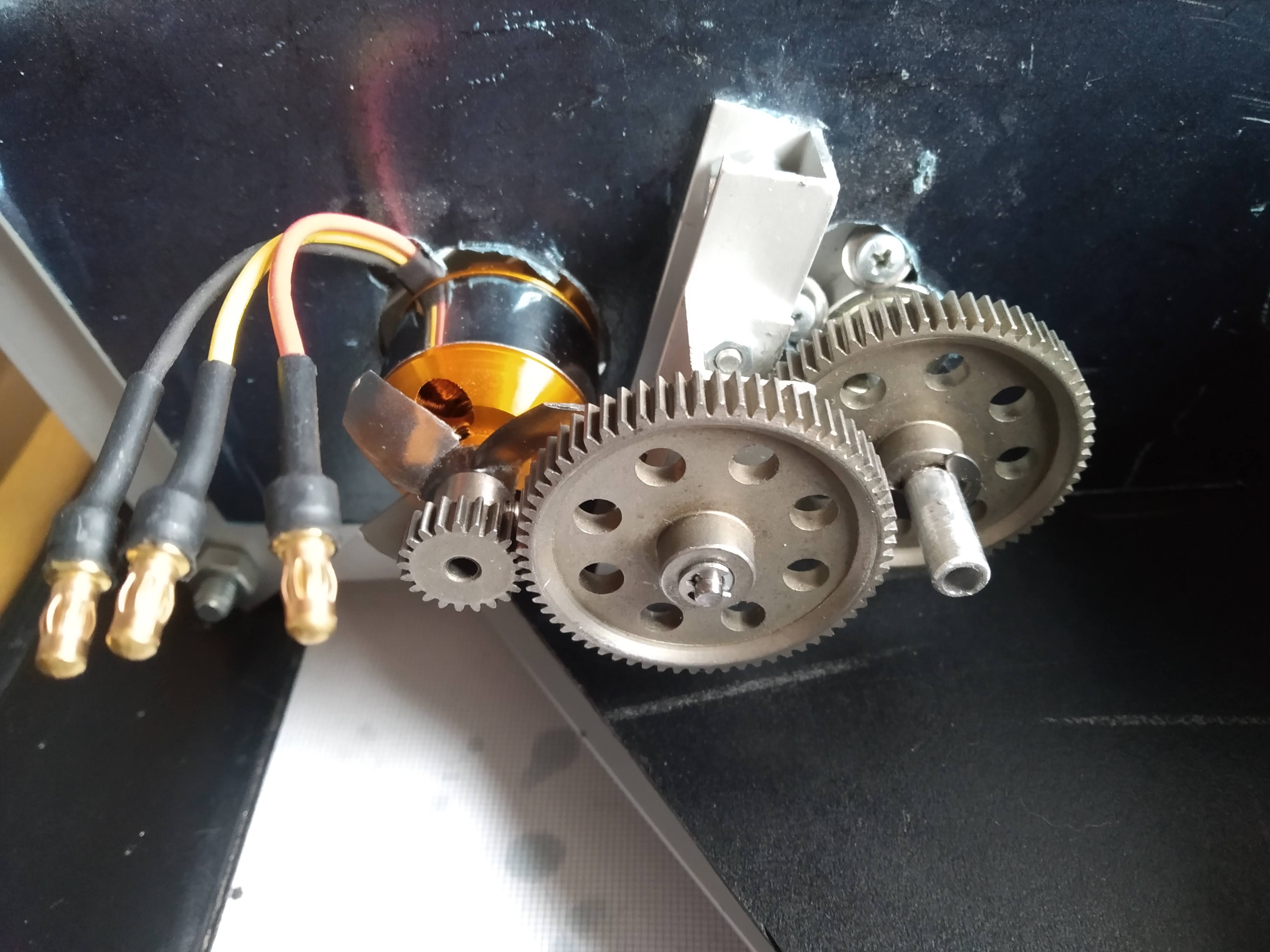
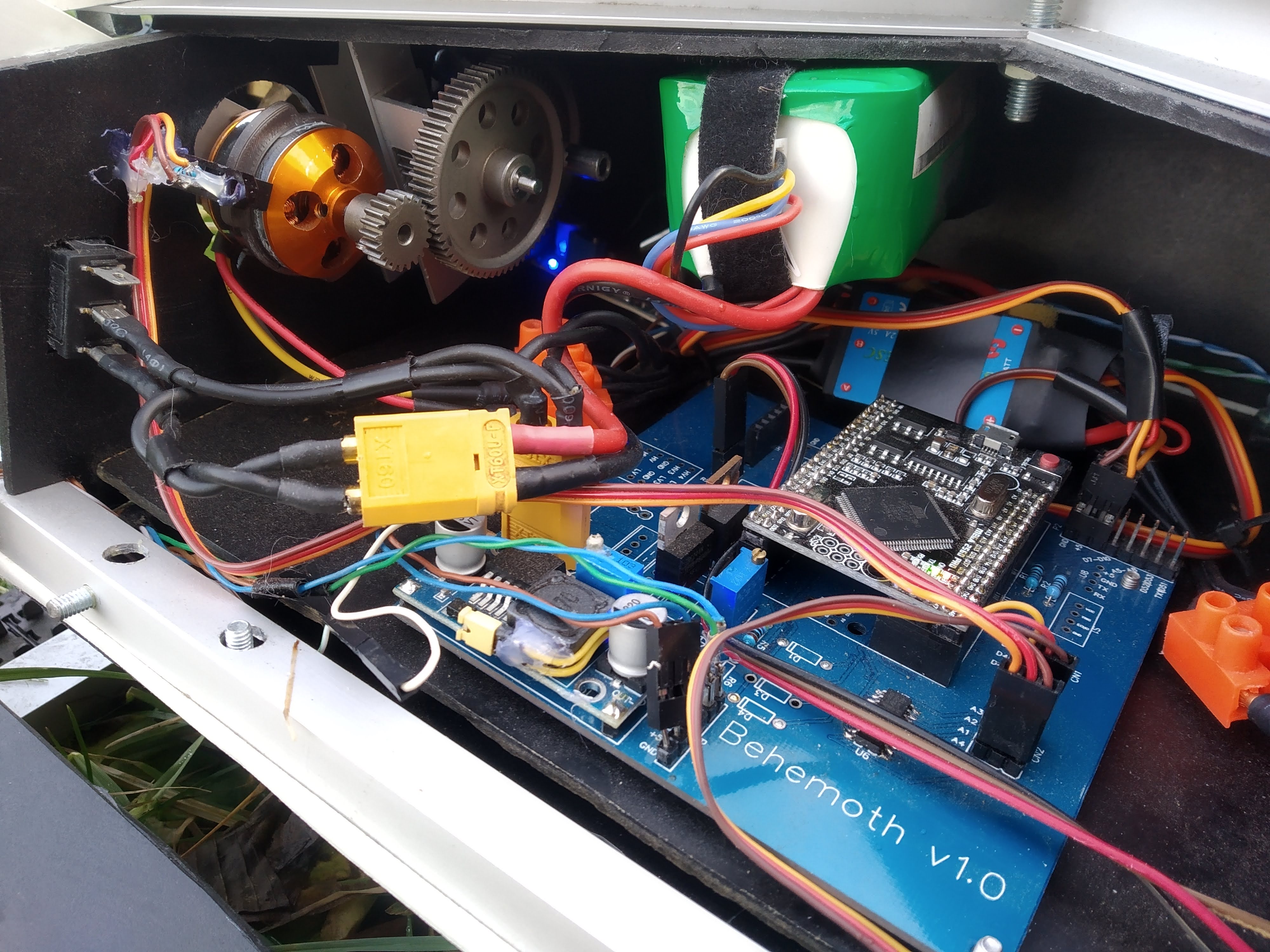
Układ napędowy czołgu składa się zasadniczo z 2 kompoenentów: silników bezszczotkowych i przekładni zębatych. Napęd każdej gąsienicy jest całkowicie niezależny, co umożliwia skręcanie.
Wybrane silniki to standardowe chińskie silniki typu "pomarańczowe" w rozmiarze 2212, 950kV. Są bardzo tanie, mają stanowczo wystarczającą moc do tego zastosowania i stosunkowo niskie kV. Dodatkowo mają ośkę 3 mm, dzięki czemu można łatwo zamocować na niej zębatkę będącą pierwszym stopniem przekładni.
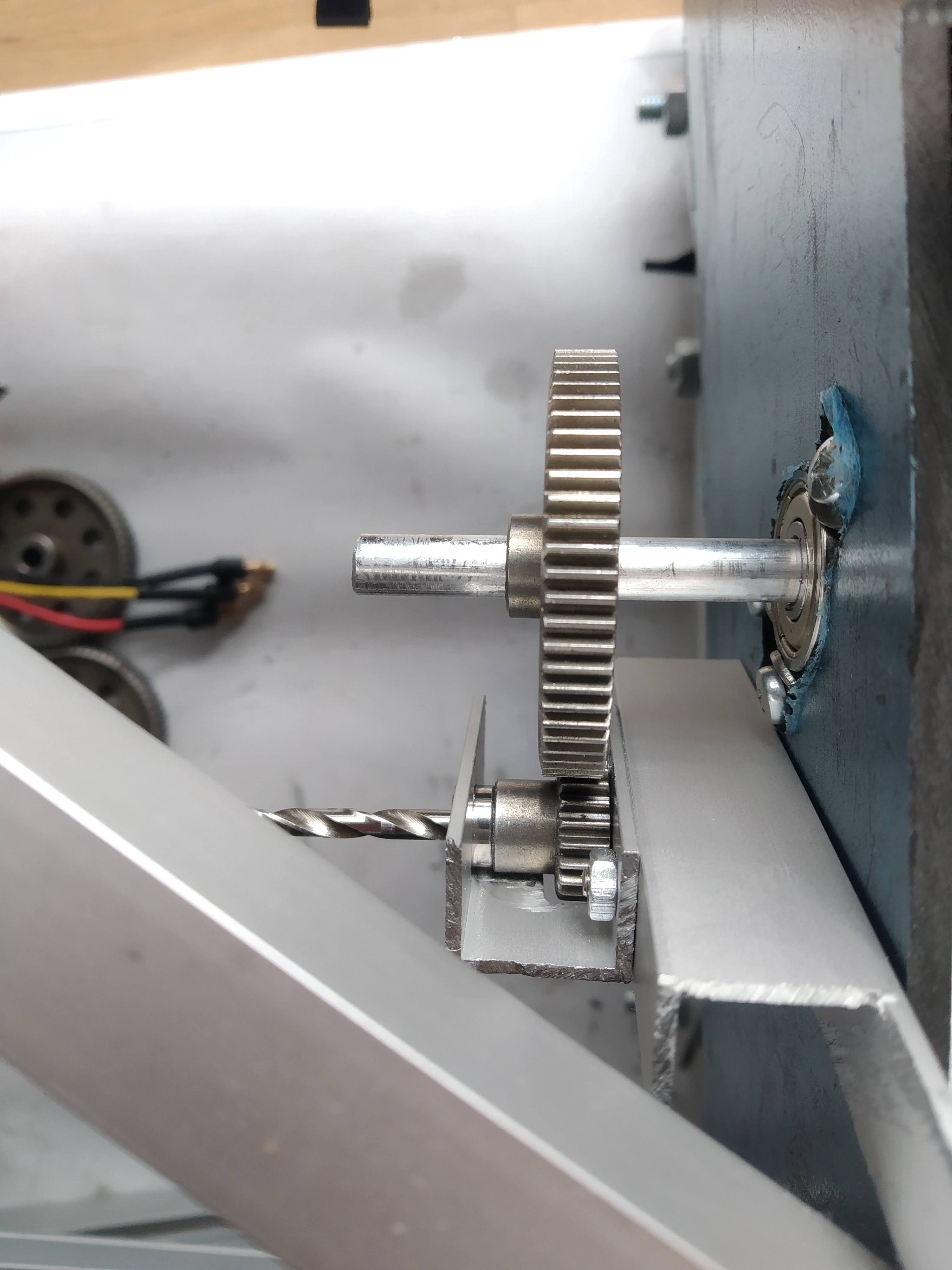
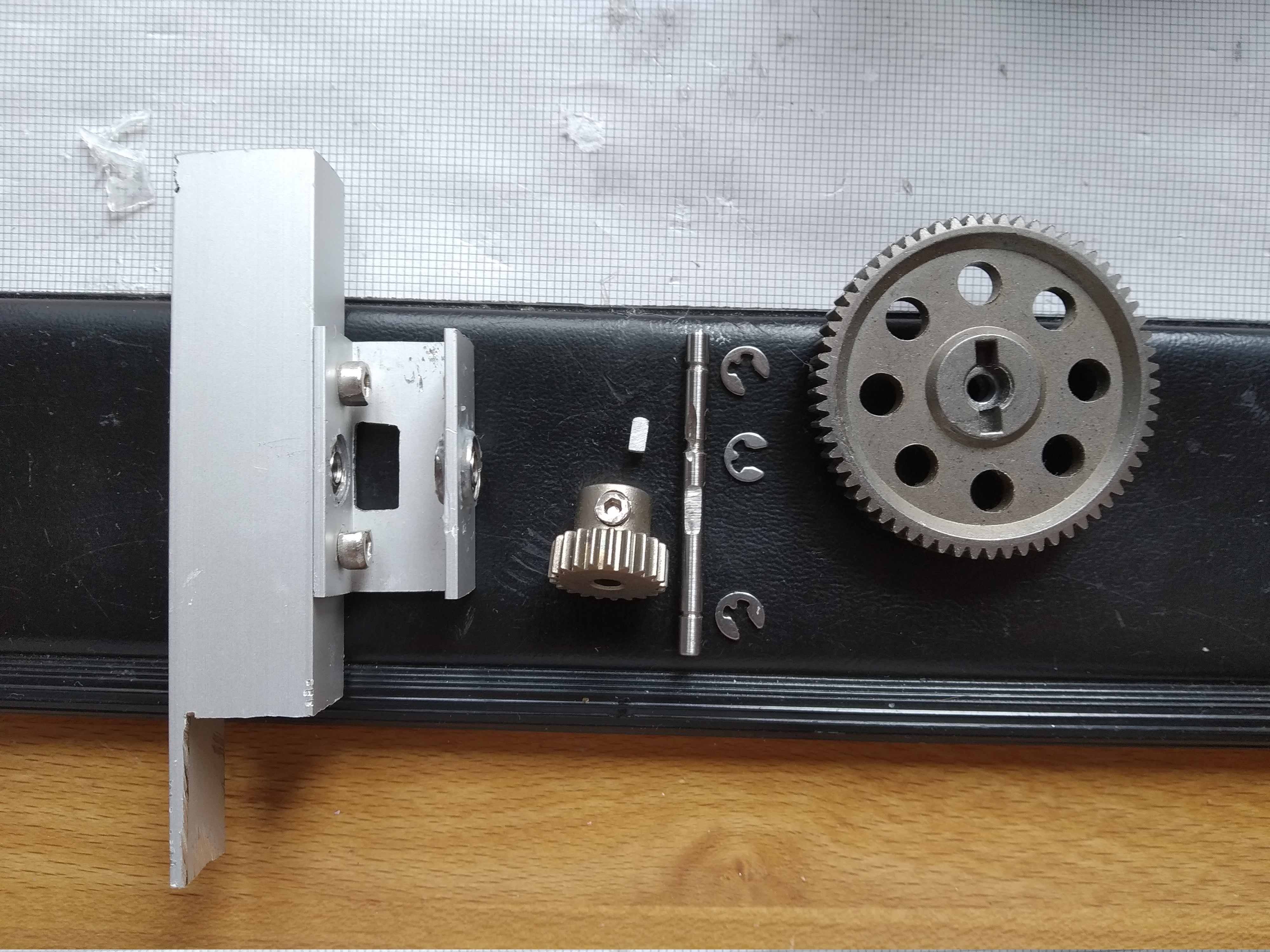
Sama przekładnia była koniecznością, wynikającą z zastosowania silników jednak niewątpliwie przeznaczonych do dronów. Żeby osiągnąć moment obrotowy niezbędny do poruszenia gąsienic zastosowano przekładnię zębatą 1:9, składającą sie z dwuch stopni 1:3. Bazuje ona na spiekanych (stalowych/żelaznych) zębatkach od chińczyka, które zostały dostosowane dremelem do konkretnego zastosowania. Dodatkowo, z metalu trzeba było wykonać całą resztę przekładni to jest: ośki, aluminiowe komponenty utrzymujące całość i inne drobne elementy. Było to zadanie dosyć karkołomne, ale ostatecznie przekładnie wyszły całkiem rozsądnie. Nie będę tutaj opisywał dokładnie rozkładu osiek i zębatek, bo najlepiej to widać na zdjęciach.

Płytka PCB 10.2020
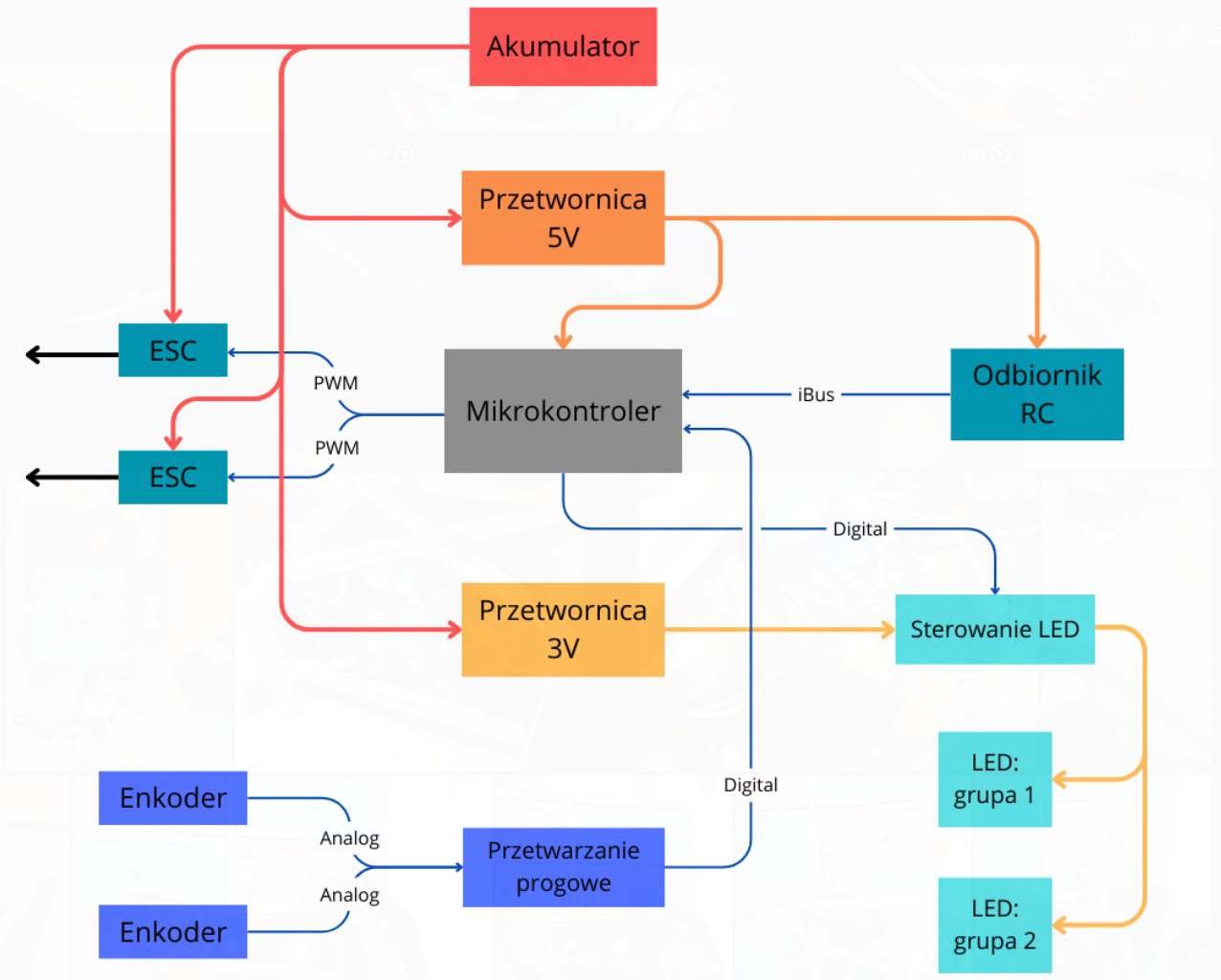
Całość układu elektroniki spełnia następujące zadania:
- zbieranie informacji z czujników znajdujacych się na pokładzie pojazdu;
- komunikacja z operatorem za pomocą aparatury radiowej;
- sterowanie silnikami BLDC;
- obsługa innych peryferiów, takich jak oświetlenie LED.
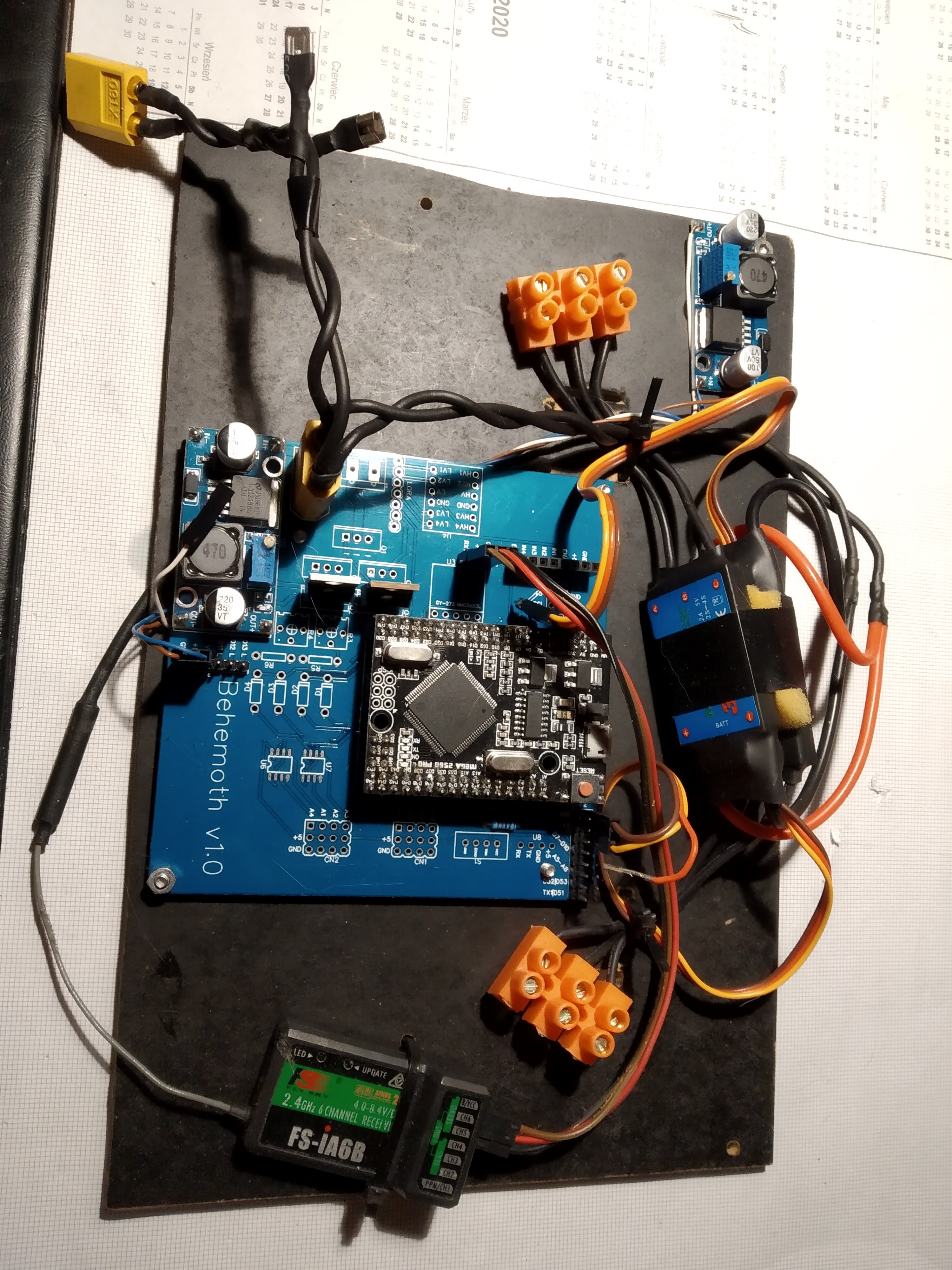
Jako mikrokontroler będący sercem całego układu wybrane zostało Arduino Mega 2560 Mini oparte o układ scalony ATmega2560. W tym 2021 roku nie znałem nic więcej niż Arduino, więc to tego projektu wybrałem najpotężniejsze, czyli Megę. Ten wariant mini to wynalazek chiński, mający na celu wciśnięcie ponad 60 pinów na jak najmniejszą płytkę.
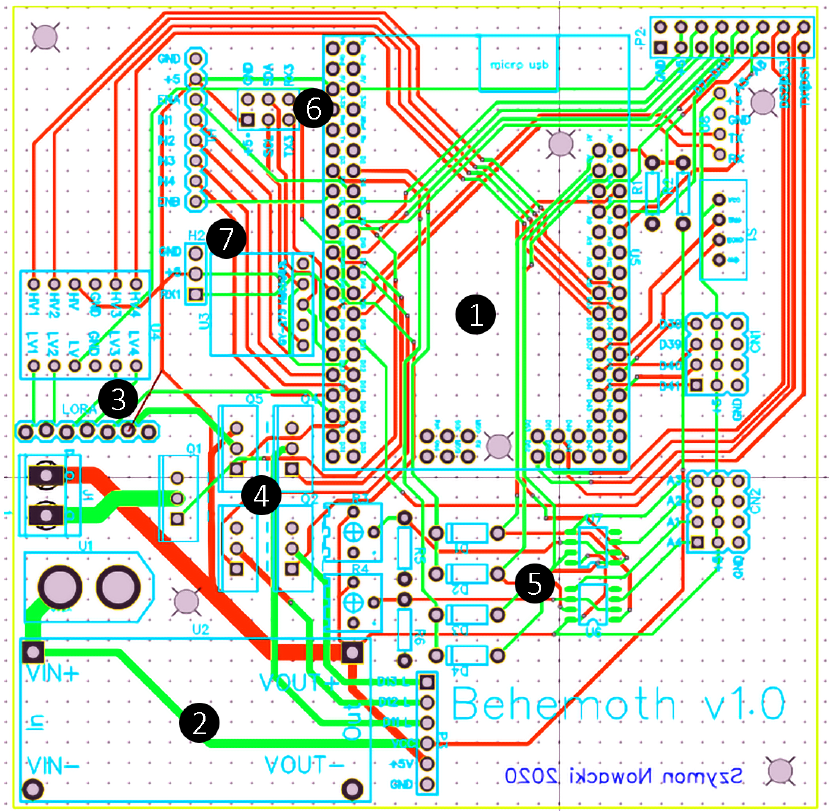
Jako że zapowiadało się, że w czołgu będzie dużo elektroniki, postanowiłem zamówić płytkę z JLCPCB. Dzieli się ona na 4 podzespoły:
- sekcja zasilania;
- mikrokontroler i wyprowadzenia jego wyjść;
- układ przetwarzania sygnałów;
- złącza dla dodatkowych komponentów (w celu późniejszego rozwoju układu).
Mikrokontroler został zamontowany na dwurzędowych złączach goldpin o rastrze 2,54 mm w centralnej części płytki. Aby jak najbardziej ułatwić późniejszą rozbudowę, wyprowadzono bardzo wiele jego złącz. Główne konektory tego typu znajdują się po prawej stronie płytki PCB w 2 grupach. Górna grupa (złącze P1) jest zbiorem 12 wyprowadzonych portów GPIO i wejść analogowych. Dolna grupa (złącze CN1) to 4 wyjścia PWM przystosowane do podłączania serwomechanizmów, lub innych peryferiów korzystających ze standardowego 3-pinowego złącza o konfiguracji DATA-VCC-GND. Dodatkowo zaprojektowano specjalny konektor (nr 6 na rysunku 3.3) przystosowany do podłączenia komputera pokładowego (np. Raspberry Pi), składający się z zasilania i magistral I2C oraz UART. Na lewo od niego znajduje się złącze H1 zaprojektowane do sterowania silnikami pojazdu.
Układ przetwarzania sygnałów składa się z 2 podukładów: sterownika LED oraz podukładu przetwarzania progowego. Sterownik LED to zestaw 3 N-kanałowych tranzystorów MOSFET dużej mocy (IRFZ44N). Źródła tranzystorów połączone są z masą układu, a ich dreny wyprowadzone są na złącze zasilające diody LED (P3). Układ taki pozwala na zasilanie oświetlenia osobną przetwornicą znajdującą się poza główną płytką, jednocześnie sterując nim przez przerywanie obwodu po stronie masy. Układ progowania ma na celu przetworzenie sygnału analogowego enkoderów na sygnał cyfrowy. Układ działa poprzez zamianę sygnału 0-5 V na cyfrowe 0 lub 1 zależnie od ustawionego przez użytkownika progu. Wyjściowy sygnał cyfrowy może następnie zostać podany do portu przerwań sprzętowych mikrokontrolera. Do progowania sygnału wykorzystano układ wzmacniacza operacyjnego MN3581 podłączonego jako komparator.
Reszta elektroniki 01.2021
Do sterowania pojazdem wykorzystałem odbiornik FlySky fs-ia6b, ponieważ była to cześć ekosystemu, który wtedy używałem. Poza zwykłymi PWMami można z niego wyciągnąć też sygnał I-Bus. Jest to własny protokół FlySky, który na szczęście doczekał się biblioteki do Arduino. Także łatwo mogłem go wykorzystać.
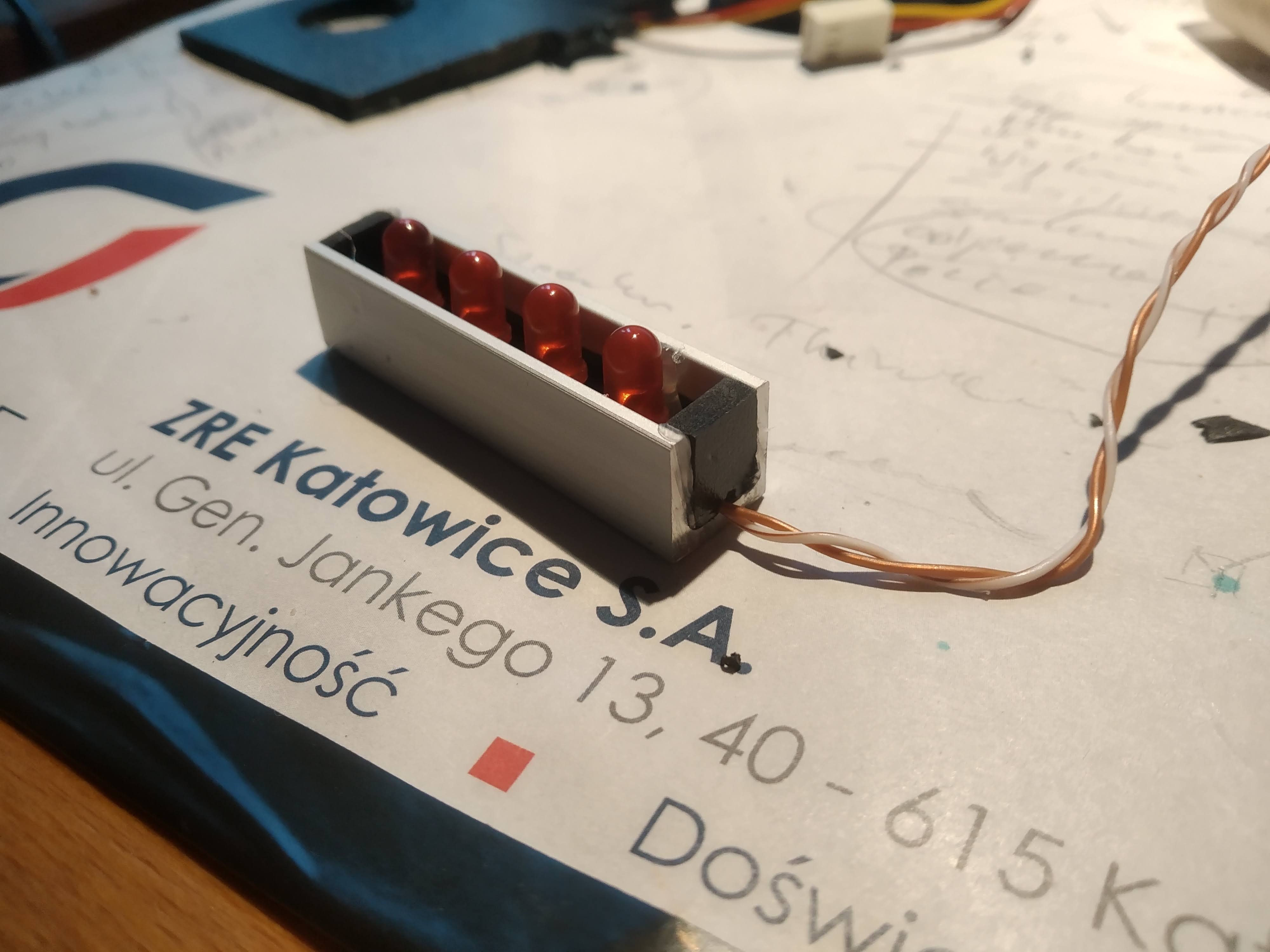
Jak już budowałem wszystko po swojemu, postanowiłem też dać do pojazdu dużo ledów, żeby wyglądało elegancko. Także zamontowałem z tyłu 8 czerwonych ledów, i z przodu 2 grupy reflektorów, jedną słabszą (2x0.5W) i jedną mocniejszą (2x1W). Dzięki temu są światła "dzienne" i "długie".
Jako, że gąsienice muszą się kręcić do przodu i do tyłu, musiałem zastosować ESCki, które na to pozwolą. Żeby nie męczyć się z przeprogramowywaniem regulatorów, kupiłem od razu takie, co mają przód i tył. Są to bliżej nieokreślone ESCki od chińczyka przeznaczone do dronów, ale działają bez problemu.
Jako źródło zasilania wykorzystałem akumulator Li-Po Multistar 3S 5600mAh, bo akurat taki miałem. Jest to bateria, którą mam od lat i sprawuje się świetnie. Czołg może na tym akumulatorze jeździć dobrze ponad godzinę.

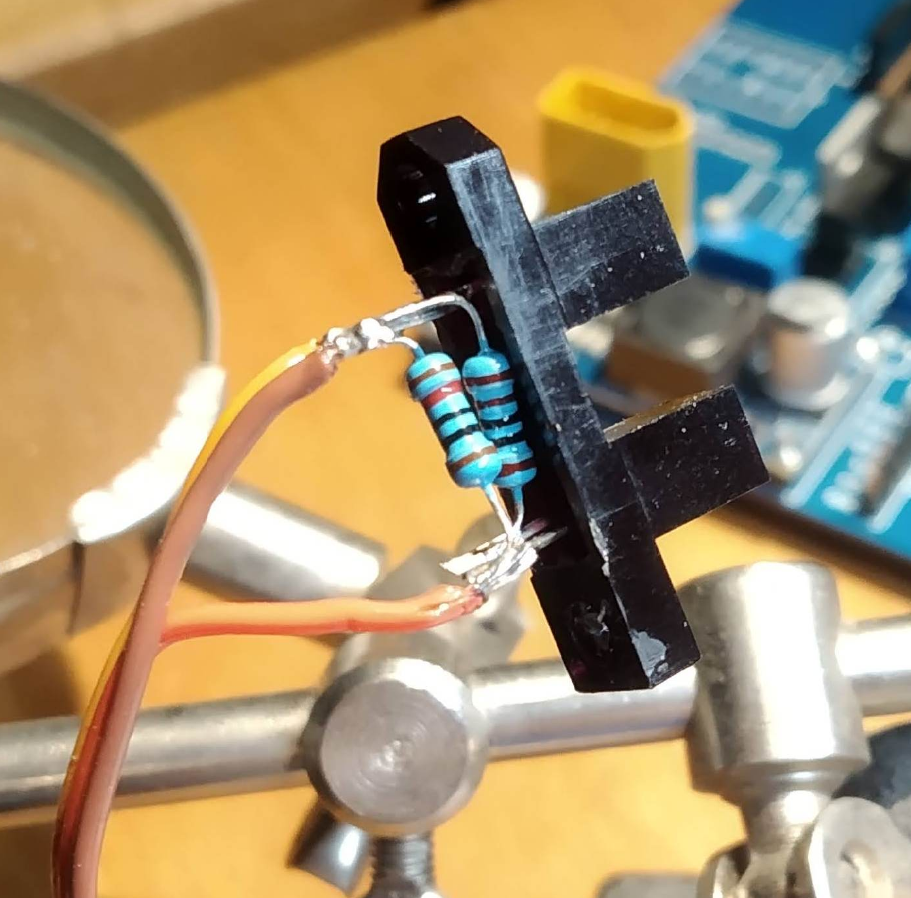
Enkodery i sprzężenie zwrotne 06.2023
Na koniec do działającego już czołgu postanowiłem dołożyć enkodery na silnikach. Zostały one zrobione z czujników szczelinowych, które nadają 2 impulsy na obrót silnika. Pozwala to sterować prędkością silników za pomocą prostej pętli PID co polepsza nieco prowadzenie pojazdu. Ogólnie minimalizuje to zmiany prędkości gąsienic w zależności od terenu, dzięki czemu np. czołg nie skręca po napodkaniu przeszkody.